
- 4155 lecturas
En la última década fuimos testigos de increíbles avances para la conquista espacial, siendo los robots los grandes protagonistas. Además del sofisticado Mars Curiosity de la NASA, existe una gran cantidad de otras propuestas esperando salir a explorar Marte o la Luna. Estos diseños son capaces de recopilar datos valiosos, pero no pueden realizar el trabajo por sí mismos: son manejados desde la Tierra.
Esto hace que las misiones extraplanetarias todavía no sean del todo eficientes, dado que cada maniobra es un proceso muy complicado y requiere de mucho tiempo: los científicos deben estudiar minuciosamente las imágenes que el robot envía antes de planificar la ruta a seguir. El problema es que cada mensaje tarda unos 20 minutos en llegar y no se puede establecer contacto más de una o dos veces por día. Esto resulta una pérdida de tiempo, más si se considera que los robots demandan muchísimo dinero y tienen una vida útil muy corta como para no aprovechar cada segundo de exploración.
Buscando que los vehículos del futuro sean más eficientes, científicos de la NASA en California están desarrollando una nueva tecnología para lograr rovers autónomos. Se trata de TextureCam, un instrumento que le permitiría recopilar más datos en menos tiempo.

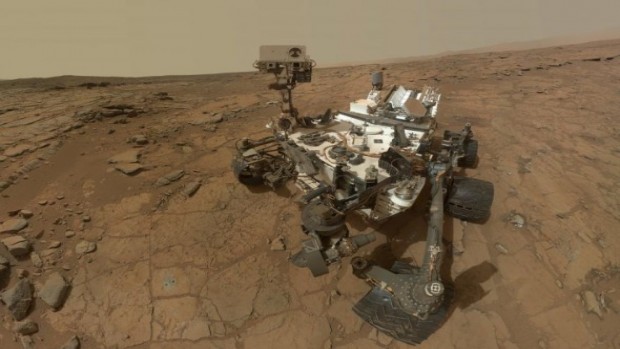
©NASA, JPL-Caltech/ Difusión
Esta cámara -que en principio se usaría para Marte- serviría para que cada robot sea capaz de identificar piezas valiosas y tomar decisiones por su cuenta. Esto sería sumamente valioso, dado que las naves de hoy en día -como Curiosity- son capaces de transitar el terreno de manera autónoma, pero deben esperar órdenes para saber cuál es el objeto de interés.
TextureCam funciona con dos lentes que toman imágenes 3D, procesadas por un ordenador a bordo. Este analiza la textura de los objetos registrados para determinar si son interesantes: lo hace luego de recibir algún tipo de formación inicial, donde se le proporciona ejemplos de lo que debe buscar. De hallar material valioso, puede decidir acercarse, explorarlo y enviar muestras a la Tierra, lo que reduciría considerablemente el tráfico de datos innecesarios.

©NASA, JPL-Caltech/ Difusión
Las primeras pruebas de TextureCam se realizaron en el desierto de Mojave, en California, luego de entrenar al sistema con imágenes que otros rovers tomaron en el planeta rojo. Los resultados arrojaron que esta tecnología es capaz de dar prioridad a las rocas científicamente más interesantes.
Su implementación podría concretarse en la misión que la Nasa planea a Marte para el 2020. Además, según sus creadores, la TextureCam también podría ser de utilidad para otro tipo de exploraciones, como por ejemplo un futuro desembarco en Europa, la luna de Júpiter.
(Tomado de tudiscovery.com)


- 4155 lecturas












